- Главная
- Продукты
- Промышленные роботы
- Декартовы роботы
- Портальные роботы
Портальные роботы
-
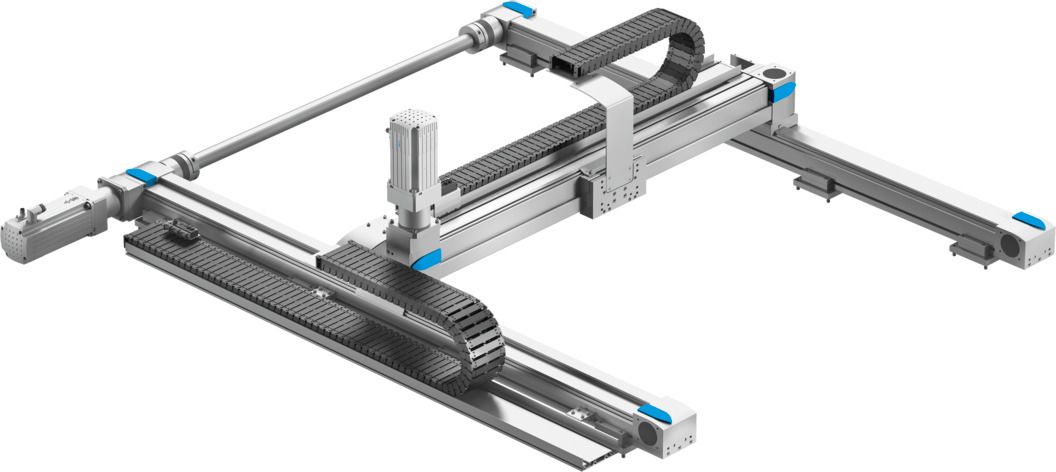
YXCF
- Готовая к установке комплексная система, включающая в себя энергетическую цепь для кабелей или труб, а также подходящий комплект электродвигателей и сервоприводов
- Для двумерных перемещений в горизонтальных рабочих зонах
- Концепция последовательного кинематического привода, основанная на зубчатом ремне и осях шпинделя
-

EXCH_FP
- Осевой механизм, основанный на параллельном кинематическом принципе работы
- Оптимальный динамический отклик по сравнению с другими декартовыми портальными системами
- Концепция привода с малым собственным весом при перемещении и большим рабочим пространством
-
EXCM_FP
- Осевой механизм, основанный на параллельном кинематическом принципе работы
- Превосходная функциональность в небольших монтажных помещениях
- Малый вес при перемещении и плоская конструкция системы
-
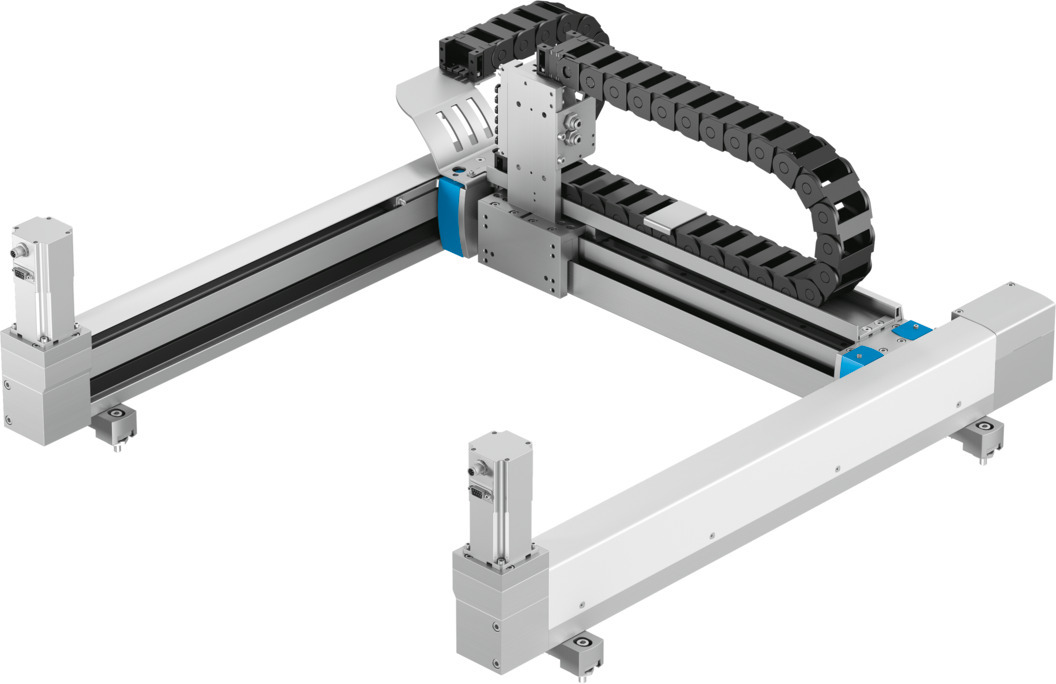
YXMF
- Компактная или высокодинамичная конструкция с параллельным кинематическим приводом
- Готовая к установке комплексная система, включающая в себя энергетическую цепь для кабелей или труб, а также подходящий комплект электродвигателей и сервоприводов
- Основана на механике порталов с плоской поверхностью EXCM и EXCH
Портальные роботы FESTO — подбор по параметрам: Длина кабеля [см], Защита от твердых частиц, Монтажный комплект.
В разделе представлены серии: YXCF, EXCH_FP, EXCM_FP, .
Консультация, подбор и доставка по России.